
快速构建卡证类OCR.md 29 KB
快速构建卡证类OCR
- 快速构建卡证类OCR
1. 金融行业卡证识别应用
1.1 金融行业中的OCR相关技术
《“十四五”数字经济发展规划》指出,2020年我国数字经济核心产业增加值占GDP比重达7.8%,随着数字经济迈向全面扩展,到2025年该比例将提升至10%。
在过去数年的跨越发展与积累沉淀中,数字金融、金融科技已在对金融业的重塑与再造中充分印证了其自身价值。
以智能为目标,提升金融数字化水平,实现业务流程自动化,降低人力成本。
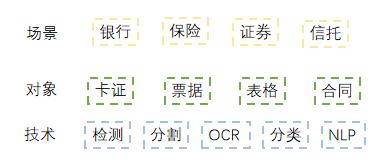
1.2 金融行业中的卡证识别场景介绍
应用场景:身份证、银行卡、营业执照、驾驶证等。
应用难点:由于数据的采集来源多样,以及实际采集数据各种噪声:反光、褶皱、模糊、倾斜等各种问题干扰。

1.3 OCR落地挑战

2. 卡证识别技术解析
2.1 卡证分类模型
卡证分类:基于PPLCNet
与其他轻量级模型相比在CPU环境下ImageNet数据集上的表现
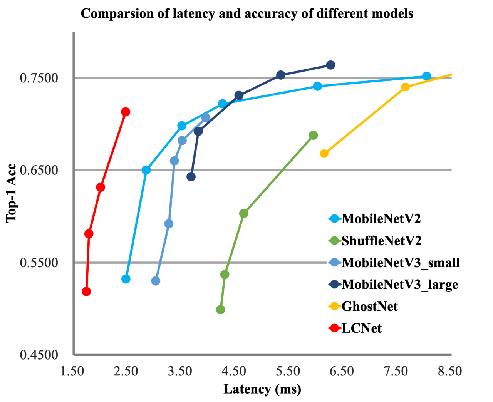
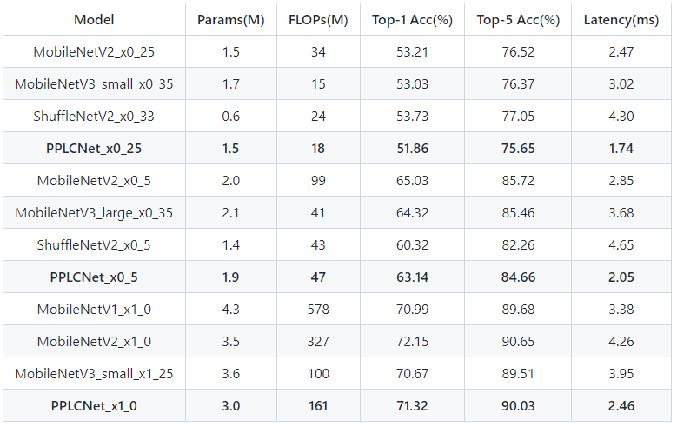
- 模型来自模型库PaddleClas,它是一个图像识别和图像分类任务的工具集,助力使用者训练出更好的视觉模型和应用落地。
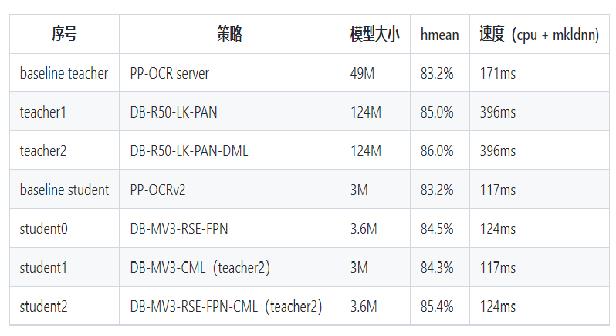
2.2 卡证识别模型
- 检测:DBNet 识别:SVRT

- PPOCRv3在文本检测、识别进行了一系列改进优化,在保证精度的同时提升预测效率

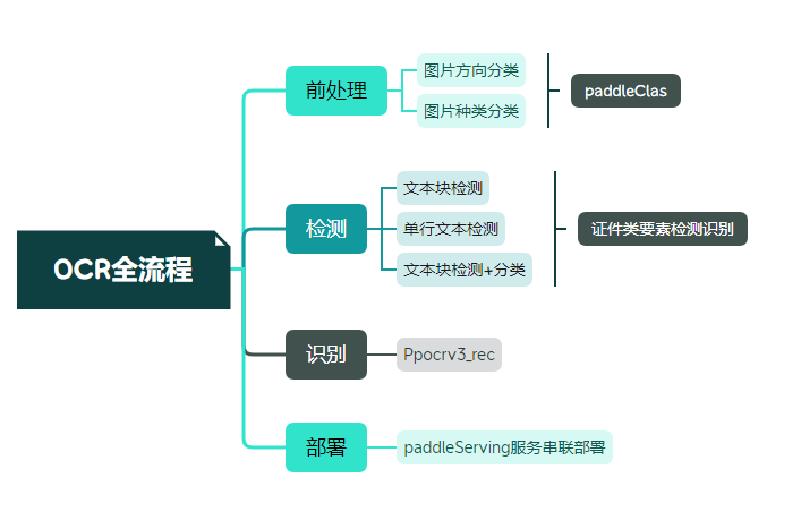
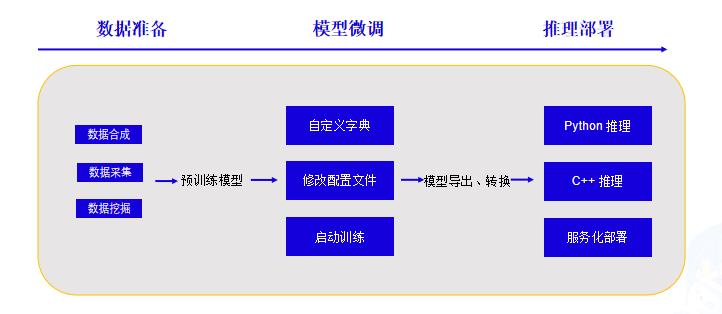
3. OCR技术拆解
3.1技术流程
3.2 OCR技术拆解---卡证分类
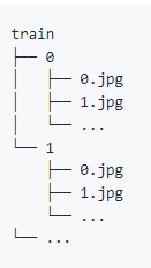
卡证分类:数据、模型准备
A 使用爬虫获取无标注数据,将相同类别的放在同一文件夹下,文件名从0开始命名。具体格式如下图所示。
注:卡证类数据,建议每个类别数据量在500张以上
B 一行命令生成标签文件
tree -r -i -f | grep -E "jpg|JPG|jpeg|JPEG|png|PNG|webp" | awk -F "/" '{print $0" "$2}' > train_list.txt
C 下载预训练模型
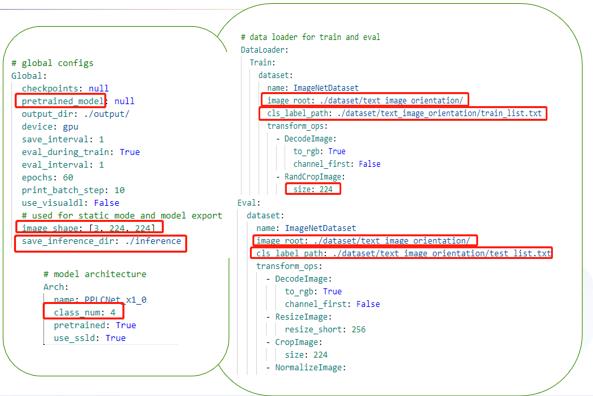
卡证分类---修改配置文件
配置文件主要修改三个部分:
全局参数:预训练模型路径/训练轮次/图像尺寸
模型结构:分类数
数据处理:训练/评估数据路径
卡证分类---训练
指定配置文件启动训练:
!python /home/aistudio/work/PaddleClas/tools/train.py -c /home/aistudio/work/PaddleClas/ppcls/configs/PULC/text_image_orientation/PPLCNet_x1_0.yaml
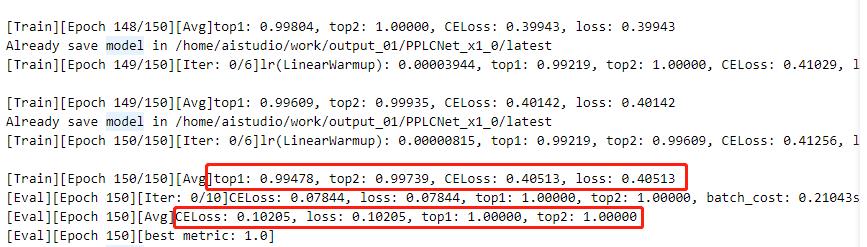
注:日志中显示了训练结果和评估结果(训练时可以设置固定轮数评估一次)
3.2 OCR技术拆解---卡证识别
卡证识别(以身份证检测为例) 存在的困难及问题:
在自然场景下,由于各种拍摄设备以及光线、角度不同等影响导致实际得到的证件影像千差万别。
如何快速提取需要的关键信息
多行的文本信息,检测结果如何正确拼接

OCR技术拆解---OCR工具库
PaddleOCR是一个丰富、领先且实用的OCR工具库,助力开发者训练出更好的模型并应用落地
身份证识别:用现有的方法识别
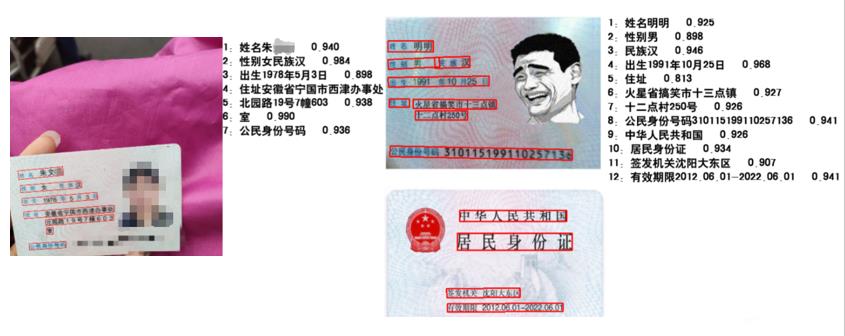
身份证识别:检测+分类
方法:基于现有的dbnet检测模型,加入分类方法。检测同时进行分类,从一定程度上优化识别流程
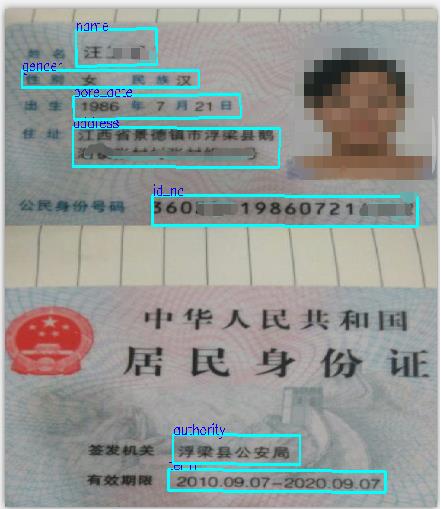
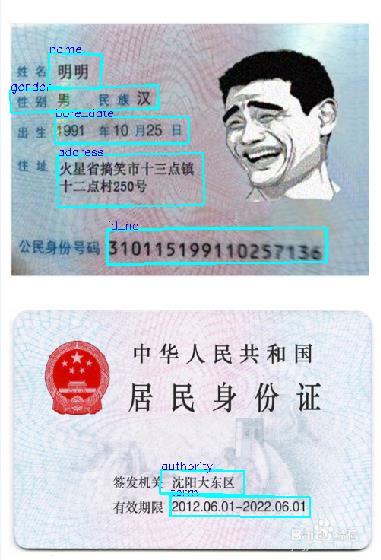
数据标注
使用PaddleOCRLable进行快速标注
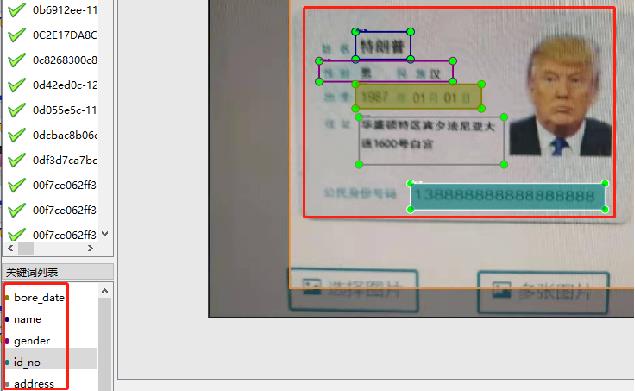
- 修改PPOCRLabel.py,将下图中的kie参数设置为True

- 数据标注踩坑分享

注:两者只有标注有差别,训练参数数据集都相同
4 . 项目实践
AIStudio项目链接:快速构建卡证类OCR
4.1 环境准备
1)拉取paddleocr项目,如果从github上拉取速度慢可以选择从gitee上获取。
!git clone https://github.com/PaddlePaddle/PaddleOCR.git -b release/2.6 /home/aistudio/work/
2)获取并解压预训练模型,如果要使用其他模型可以从模型库里自主选择合适模型。
!wget -P work/pre_trained/ https://paddleocr.bj.bcebos.com/PP-OCRv3/chinese/ch_PP-OCRv3_det_distill_train.tar
!tar -vxf /home/aistudio/work/pre_trained/ch_PP-OCRv3_det_distill_train.tar -C /home/aistudio/work/pre_trained
3) 安装必要依赖
!pip install -r /home/aistudio/work/requirements.txt
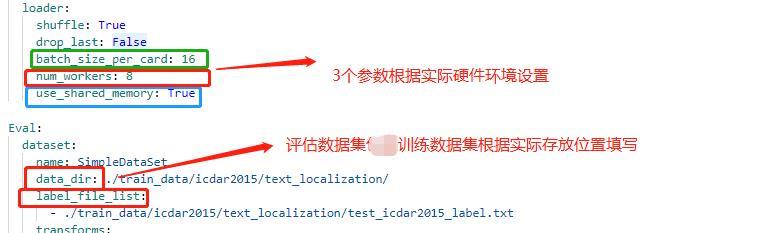
4.2 配置文件修改
修改配置文件 work/configs/det/detmv3db.yml
具体修改说明如下:
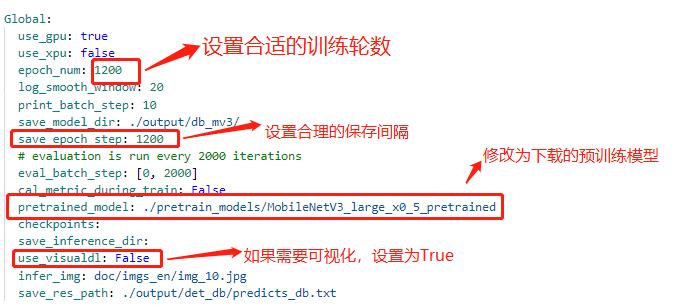
注:在上述的配置文件的Global变量中需要添加以下两个参数:
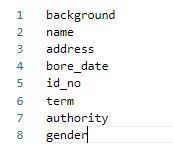
label_list 为标签表 num_classes 为分类数 上述两个参数根据实际的情况配置即可

其中lable_list内容如下例所示,建议第一个参数设置为 background,不要设置为实际要提取的关键信息种类:
配置文件中的其他设置说明

4.3 代码修改
4.3.1 数据读取
修改 PaddleOCR/ppocr/data/imaug/label_ops.py中的DetLabelEncode
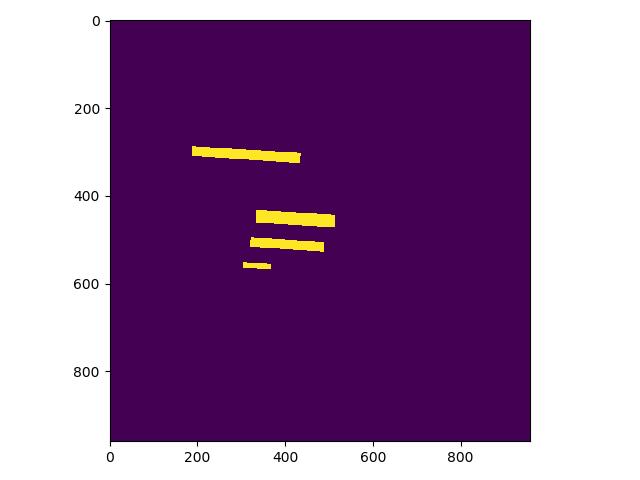
class DetLabelEncode(object): # 修改检测标签的编码处,新增了参数分类数:num_classes,重写初始化方法,以及分类标签的读取 def __init__(self, label_list, num_classes=8, **kwargs): self.num_classes = num_classes self.label_list = [] if label_list: if isinstance(label_list, str): with open(label_list, 'r+', encoding='utf-8') as f: for line in f.readlines(): self.label_list.append(line.replace("\n", "")) else: self.label_list = label_list else: assert ' please check label_list whether it is none or config is right' if num_classes != len(self.label_list): # 校验分类数和标签的一致性 assert 'label_list length is not equal to the num_classes' def __call__(self, data): label = data['label'] label = json.loads(label) nBox = len(label) boxes, txts, txt_tags, classes = [], [], [], [] for bno in range(0, nBox): box = label[bno]['points'] txt = label[bno]['key_cls'] # 此处将kie中的参数作为分类读取 boxes.append(box) txts.append(txt) if txt in ['*', '###']: txt_tags.append(True) if self.num_classes > 1: classes.append(-2) else: txt_tags.append(False) if self.num_classes > 1: # 将KIE内容的key标签作为分类标签使用 classes.append(int(self.label_list.index(txt))) if len(boxes) == 0: return None boxes = self.expand_points_num(boxes) boxes = np.array(boxes, dtype=np.float32) txt_tags = np.array(txt_tags, dtype=np.bool) classes = classes data['polys'] = boxes data['texts'] = txts data['ignore_tags'] = txt_tags if self.num_classes > 1: data['classes'] = classes return data修改 PaddleOCR/ppocr/data/imaug/make_shrink_map.py中的MakeShrinkMap类。这里需要注意的是,如果我们设置的label_list中的第一个参数为要检测的信息那么会得到如下的mask,
举例说明: 这是检测的mask图,图中有四个mask那么实际对应的分类应该是4类
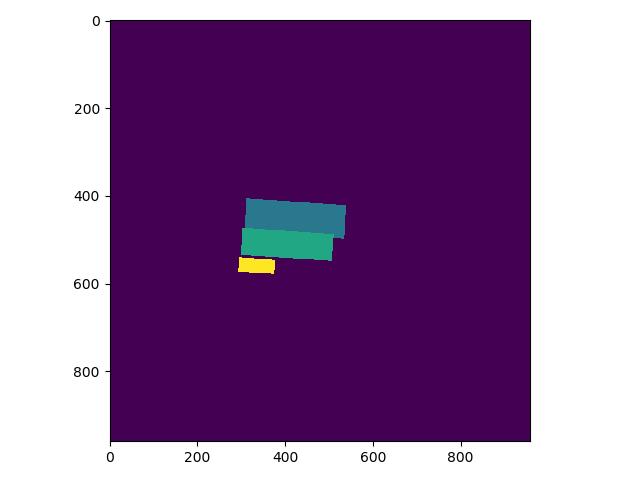
label_list中第一个为关键分类,则得到的分类Mask实际如下,与上图相比,少了一个box:
class MakeShrinkMap(object):
r'''
Making binary mask from detection data with ICDAR format.
Typically following the process of class `MakeICDARData`.
'''
def __init__(self, min_text_size=8, shrink_ratio=0.4, num_classes=8, **kwargs):
self.min_text_size = min_text_size
self.shrink_ratio = shrink_ratio
self.num_classes = num_classes # 添加了分类
def __call__(self, data):
image = data['image']
text_polys = data['polys']
ignore_tags = data['ignore_tags']
if self.num_classes > 1:
classes = data['classes']
h, w = image.shape[:2]
text_polys, ignore_tags = self.validate_polygons(text_polys,
ignore_tags, h, w)
gt = np.zeros((h, w), dtype=np.float32)
mask = np.ones((h, w), dtype=np.float32)
gt_class = np.zeros((h, w), dtype=np.float32) # 新增分类
for i in range(len(text_polys)):
polygon = text_polys[i]
height = max(polygon[:, 1]) - min(polygon[:, 1])
width = max(polygon[:, 0]) - min(polygon[:, 0])
if ignore_tags[i] or min(height, width) < self.min_text_size:
cv2.fillPoly(mask,
polygon.astype(np.int32)[np.newaxis, :, :], 0)
ignore_tags[i] = True
else:
polygon_shape = Polygon(polygon)
subject = [tuple(l) for l in polygon]
padding = pyclipper.PyclipperOffset()
padding.AddPath(subject, pyclipper.JT_ROUND,
pyclipper.ET_CLOSEDPOLYGON)
shrinked = []
# Increase the shrink ratio every time we get multiple polygon returned back
possible_ratios = np.arange(self.shrink_ratio, 1,
self.shrink_ratio)
np.append(possible_ratios, 1)
for ratio in possible_ratios:
distance = polygon_shape.area * (
1 - np.power(ratio, 2)) / polygon_shape.length
shrinked = padding.Execute(-distance)
if len(shrinked) == 1:
break
if shrinked == []:
cv2.fillPoly(mask,
polygon.astype(np.int32)[np.newaxis, :, :], 0)
ignore_tags[i] = True
continue
for each_shirnk in shrinked:
shirnk = np.array(each_shirnk).reshape(-1, 2)
cv2.fillPoly(gt, [shirnk.astype(np.int32)], 1)
if self.num_classes > 1: # 绘制分类的mask
cv2.fillPoly(gt_class, polygon.astype(np.int32)[np.newaxis, :, :], classes[i])
data['shrink_map'] = gt
if self.num_classes > 1:
data['class_mask'] = gt_class
data['shrink_mask'] = mask
return data
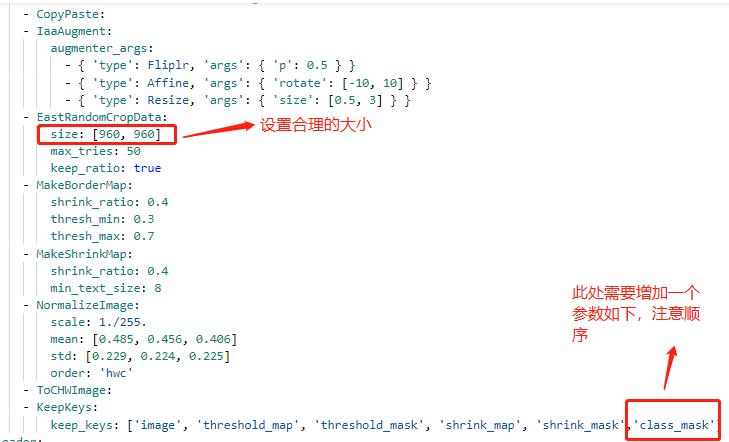
由于在训练数据中会对数据进行resize设置,yml中的操作为:EastRandomCropData,所以需要修改PaddleOCR/ppocr/data/imaug/random_crop_data.py中的EastRandomCropData
class EastRandomCropData(object):
def __init__(self,
size=(640, 640),
max_tries=10,
min_crop_side_ratio=0.1,
keep_ratio=True,
num_classes=8,
**kwargs):
self.size = size
self.max_tries = max_tries
self.min_crop_side_ratio = min_crop_side_ratio
self.keep_ratio = keep_ratio
self.num_classes = num_classes
def __call__(self, data):
img = data['image']
text_polys = data['polys']
ignore_tags = data['ignore_tags']
texts = data['texts']
if self.num_classes > 1:
classes = data['classes']
all_care_polys = [
text_polys[i] for i, tag in enumerate(ignore_tags) if not tag
]
# 计算crop区域
crop_x, crop_y, crop_w, crop_h = crop_area(
img, all_care_polys, self.min_crop_side_ratio, self.max_tries)
# crop 图片 保持比例填充
scale_w = self.size[0] / crop_w
scale_h = self.size[1] / crop_h
scale = min(scale_w, scale_h)
h = int(crop_h * scale)
w = int(crop_w * scale)
if self.keep_ratio:
padimg = np.zeros((self.size[1], self.size[0], img.shape[2]),
img.dtype)
padimg[:h, :w] = cv2.resize(
img[crop_y:crop_y + crop_h, crop_x:crop_x + crop_w], (w, h))
img = padimg
else:
img = cv2.resize(
img[crop_y:crop_y + crop_h, crop_x:crop_x + crop_w],
tuple(self.size))
# crop 文本框
text_polys_crop = []
ignore_tags_crop = []
texts_crop = []
classes_crop = []
for poly, text, tag,class_index in zip(text_polys, texts, ignore_tags,classes):
poly = ((poly - (crop_x, crop_y)) * scale).tolist()
if not is_poly_outside_rect(poly, 0, 0, w, h):
text_polys_crop.append(poly)
ignore_tags_crop.append(tag)
texts_crop.append(text)
if self.num_classes > 1:
classes_crop.append(class_index)
data['image'] = img
data['polys'] = np.array(text_polys_crop)
data['ignore_tags'] = ignore_tags_crop
data['texts'] = texts_crop
if self.num_classes > 1:
data['classes'] = classes_crop
return data
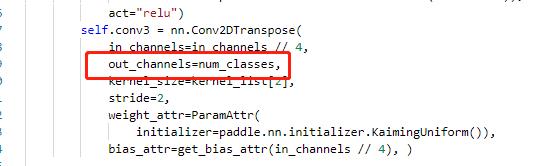
4.3.2 head修改
主要修改 ppocr/modeling/heads/det_db_head.py,将Head类中的最后一层的输出修改为实际的分类数,同时在DBHead中新增分类的head。
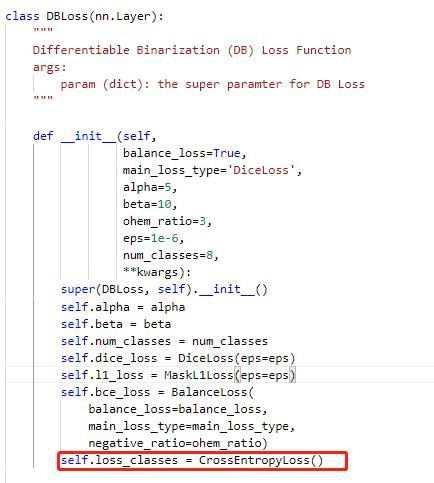
4.3.3 修改loss
修改PaddleOCR/ppocr/losses/det_db_loss.py中的DBLoss类,分类采用交叉熵损失函数进行计算。
4.3.4 后处理
由于涉及到eval以及后续推理能否正常使用,我们需要修改后处理的相关代码,修改位置 PaddleOCR/ppocr/postprocess/db_postprocess.py中的DBPostProcess类
class DBPostProcess(object):
"""
The post process for Differentiable Binarization (DB).
"""
def __init__(self,
thresh=0.3,
box_thresh=0.7,
max_candidates=1000,
unclip_ratio=2.0,
use_dilation=False,
score_mode="fast",
**kwargs):
self.thresh = thresh
self.box_thresh = box_thresh
self.max_candidates = max_candidates
self.unclip_ratio = unclip_ratio
self.min_size = 3
self.score_mode = score_mode
assert score_mode in [
"slow", "fast"
], "Score mode must be in [slow, fast] but got: {}".format(score_mode)
self.dilation_kernel = None if not use_dilation else np.array(
[[1, 1], [1, 1]])
def boxes_from_bitmap(self, pred, _bitmap, classes, dest_width, dest_height):
"""
_bitmap: single map with shape (1, H, W),
whose values are binarized as {0, 1}
"""
bitmap = _bitmap
height, width = bitmap.shape
outs = cv2.findContours((bitmap * 255).astype(np.uint8), cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
if len(outs) == 3:
img, contours, _ = outs[0], outs[1], outs[2]
elif len(outs) == 2:
contours, _ = outs[0], outs[1]
num_contours = min(len(contours), self.max_candidates)
boxes = []
scores = []
class_indexes = []
class_scores = []
for index in range(num_contours):
contour = contours[index]
points, sside = self.get_mini_boxes(contour)
if sside < self.min_size:
continue
points = np.array(points)
if self.score_mode == "fast":
score, class_index, class_score = self.box_score_fast(pred, points.reshape(-1, 2), classes)
else:
score, class_index, class_score = self.box_score_slow(pred, contour, classes)
if self.box_thresh > score:
continue
box = self.unclip(points).reshape(-1, 1, 2)
box, sside = self.get_mini_boxes(box)
if sside < self.min_size + 2:
continue
box = np.array(box)
box[:, 0] = np.clip(
np.round(box[:, 0] / width * dest_width), 0, dest_width)
box[:, 1] = np.clip(
np.round(box[:, 1] / height * dest_height), 0, dest_height)
boxes.append(box.astype(np.int16))
scores.append(score)
class_indexes.append(class_index)
class_scores.append(class_score)
if classes is None:
return np.array(boxes, dtype=np.int16), scores
else:
return np.array(boxes, dtype=np.int16), scores, class_indexes, class_scores
def unclip(self, box):
unclip_ratio = self.unclip_ratio
poly = Polygon(box)
distance = poly.area * unclip_ratio / poly.length
offset = pyclipper.PyclipperOffset()
offset.AddPath(box, pyclipper.JT_ROUND, pyclipper.ET_CLOSEDPOLYGON)
expanded = np.array(offset.Execute(distance))
return expanded
def get_mini_boxes(self, contour):
bounding_box = cv2.minAreaRect(contour)
points = sorted(list(cv2.boxPoints(bounding_box)), key=lambda x: x[0])
index_1, index_2, index_3, index_4 = 0, 1, 2, 3
if points[1][1] > points[0][1]:
index_1 = 0
index_4 = 1
else:
index_1 = 1
index_4 = 0
if points[3][1] > points[2][1]:
index_2 = 2
index_3 = 3
else:
index_2 = 3
index_3 = 2
box = [
points[index_1], points[index_2], points[index_3], points[index_4]
]
return box, min(bounding_box[1])
def box_score_fast(self, bitmap, _box, classes):
'''
box_score_fast: use bbox mean score as the mean score
'''
h, w = bitmap.shape[:2]
box = _box.copy()
xmin = np.clip(np.floor(box[:, 0].min()).astype(np.int), 0, w - 1)
xmax = np.clip(np.ceil(box[:, 0].max()).astype(np.int), 0, w - 1)
ymin = np.clip(np.floor(box[:, 1].min()).astype(np.int), 0, h - 1)
ymax = np.clip(np.ceil(box[:, 1].max()).astype(np.int), 0, h - 1)
mask = np.zeros((ymax - ymin + 1, xmax - xmin + 1), dtype=np.uint8)
box[:, 0] = box[:, 0] - xmin
box[:, 1] = box[:, 1] - ymin
cv2.fillPoly(mask, box.reshape(1, -1, 2).astype(np.int32), 1)
if classes is None:
return cv2.mean(bitmap[ymin:ymax + 1, xmin:xmax + 1], mask)[0], None, None
else:
k = 999
class_mask = np.full((ymax - ymin + 1, xmax - xmin + 1), k, dtype=np.int32)
cv2.fillPoly(class_mask, box.reshape(1, -1, 2).astype(np.int32), 0)
classes = classes[ymin:ymax + 1, xmin:xmax + 1]
new_classes = classes + class_mask
a = new_classes.reshape(-1)
b = np.where(a >= k)
classes = np.delete(a, b[0].tolist())
class_index = np.argmax(np.bincount(classes))
class_score = np.sum(classes == class_index) / len(classes)
return cv2.mean(bitmap[ymin:ymax + 1, xmin:xmax + 1], mask)[0], class_index, class_score
def box_score_slow(self, bitmap, contour, classes):
"""
box_score_slow: use polyon mean score as the mean score
"""
h, w = bitmap.shape[:2]
contour = contour.copy()
contour = np.reshape(contour, (-1, 2))
xmin = np.clip(np.min(contour[:, 0]), 0, w - 1)
xmax = np.clip(np.max(contour[:, 0]), 0, w - 1)
ymin = np.clip(np.min(contour[:, 1]), 0, h - 1)
ymax = np.clip(np.max(contour[:, 1]), 0, h - 1)
mask = np.zeros((ymax - ymin + 1, xmax - xmin + 1), dtype=np.uint8)
contour[:, 0] = contour[:, 0] - xmin
contour[:, 1] = contour[:, 1] - ymin
cv2.fillPoly(mask, contour.reshape(1, -1, 2).astype(np.int32), 1)
if classes is None:
return cv2.mean(bitmap[ymin:ymax + 1, xmin:xmax + 1], mask)[0], None, None
else:
k = 999
class_mask = np.full((ymax - ymin + 1, xmax - xmin + 1), k, dtype=np.int32)
cv2.fillPoly(class_mask, contour.reshape(1, -1, 2).astype(np.int32), 0)
classes = classes[ymin:ymax + 1, xmin:xmax + 1]
new_classes = classes + class_mask
a = new_classes.reshape(-1)
b = np.where(a >= k)
classes = np.delete(a, b[0].tolist())
class_index = np.argmax(np.bincount(classes))
class_score = np.sum(classes == class_index) / len(classes)
return cv2.mean(bitmap[ymin:ymax + 1, xmin:xmax + 1], mask)[0], class_index, class_score
def __call__(self, outs_dict, shape_list):
pred = outs_dict['maps']
if isinstance(pred, paddle.Tensor):
pred = pred.numpy()
pred = pred[:, 0, :, :]
segmentation = pred > self.thresh
if "classes" in outs_dict:
classes = outs_dict['classes']
if isinstance(classes, paddle.Tensor):
classes = classes.numpy()
classes = classes[:, 0, :, :]
else:
classes = None
boxes_batch = []
for batch_index in range(pred.shape[0]):
src_h, src_w, ratio_h, ratio_w = shape_list[batch_index]
if self.dilation_kernel is not None:
mask = cv2.dilate(
np.array(segmentation[batch_index]).astype(np.uint8),
self.dilation_kernel)
else:
mask = segmentation[batch_index]
if classes is None:
boxes, scores = self.boxes_from_bitmap(pred[batch_index], mask, None,
src_w, src_h)
boxes_batch.append({'points': boxes})
else:
boxes, scores, class_indexes, class_scores = self.boxes_from_bitmap(pred[batch_index], mask,
classes[batch_index],
src_w, src_h)
boxes_batch.append({'points': boxes, "classes": class_indexes, "class_scores": class_scores})
return boxes_batch
4.4. 模型启动
在完成上述步骤后我们就可以正常启动训练
!python /home/aistudio/work/PaddleOCR/tools/train.py -c /home/aistudio/work/PaddleOCR/configs/det/det_mv3_db.yml
其他命令:
!python /home/aistudio/work/PaddleOCR/tools/eval.py -c /home/aistudio/work/PaddleOCR/configs/det/det_mv3_db.yml
!python /home/aistudio/work/PaddleOCR/tools/infer_det.py -c /home/aistudio/work/PaddleOCR/configs/det/det_mv3_db.yml
模型推理
!python /home/aistudio/work/PaddleOCR/tools/infer/predict_det.py --image_dir="/home/aistudio/work/test_img/" --det_model_dir="/home/aistudio/work/PaddleOCR/output/infer"
5 总结
- 分类+检测在一定程度上能够缩短用时,具体的模型选取要根据业务场景恰当选择。
- 数据标注需要多次进行测试调整标注方法,一般进行检测模型微调,需要标注至少上百张。
- 设置合理的batch_size以及resize大小,同时注意lr设置。
References
1 https://github.com/PaddlePaddle/PaddleOCR